


Weideroboter/i-LEED
Automatisierter Weidebetrieb mit Rindern mittels Grünlandpflegeroboter und innovativem Weidemanagement
Ziel des Projektes ist es, die Weidefütterung und das Weidemanagement durch die Einführung und Vereinigung innovativer Werkzeuge zu optimieren. Die automatisierte Weidepflege mittels selbstfahrender Robotertechnik wird im Rahmen des Projekt erprobt und wissenschaftlich begleitet.Zielsetzung
 Zoombild vorhanden
Zoombild vorhanden
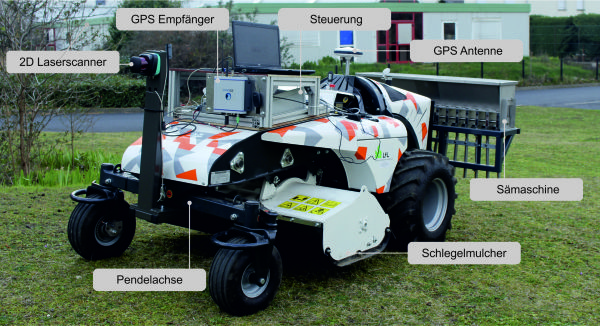
i-LEED Weideroboter
Zur Steigerung der Futtereffizienz bzw. -qualität der Weide gehören eine genaue Datenerfassung für ein optimiertes Weide- und Fütterungsmanagement sowie konkrete selektive Weidepflegemaßnahmen. Bisherige Methoden zur Datenerfassung erweisen sich entweder als zu aufwändig oder beschränken sich auf das Augenmaß des Landwirts. Mithilfe von moderner Sensortechnik sollen Informationen über die Futterqualität und -quantität ermittelt werden. Weidepflegemaßnahmen, wie das Mulchen von Geilstellen zur Verhinderung der Verunkrautung oder die Nachsaat von Fehlstellen in der Grasnarbe finden, wenn überhaupt, nur großflächig und nicht nach jeder Beweidungsphase statt. Grund dafür ist vor allem der bisherige hohe Arbeitsaufwand für Weidepflegemaßnahmen. Eine automatisierte Lösung im Sinne von „Landwirtschaft 4.0“ wurde deshalb angestrebt.
Methode
 Zoombild vorhanden
Zoombild vorhanden
NIR-Sensor
Als Basis für diese Aufgaben diente eine kommerziell erhältliche funkferngesteuerte Mähmaschine, die mit entsprechender Hardware zur automatisierten Maschine aufgerüstet wurde. Die vorhandene Funkfernsteuerung wurde durch eine embedded Hardware ersetzt, sodass die Maschine über das existierende Steuerungsprotokoll (CANopen) mit einer frei programmierbaren Software angesteuert werden kann. Die Fahrzeugnavigation basierte auf einem GPS-RTK System und vordefinierten Pfaden. Die Lokalisierung von Weideresten und Trittschäden erfolgte mit einem an der Fahrzeugfront angebrachten 2D-Laserscanner, der sogenannte Distanz- und „Energie“-werte liefert. Die Distanzwerte dienen zur Grashöhenberechnung und damit indirekt zur Ermittlung der Biomasse, da beide Werte miteinander korrelieren. Zusätzlich kam ein Nahinfrarot (NIR) Sensor mit einer Wolfram-Lichtquelle zur Ermittlung der Grasqualität zum Einsatz. Der Sensor ist an einem Blech mit Fenster befestigt, welches durch den Bewuchs gestreift wird. Zur Kalibrierung fand eine Reihe von Messungen für beide Sensoren mittels eines eigens konstruierten Messwagens statt. Dieser fuhr dabei auf einer Art Schienen über die Messfläche von 1 m². Nach dem Abernten des Grases wurde dessen Frisch- und Trockenmasse bestimmt und eine Laboranalyse durchgeführt. Zur Nachsaat von Trittschäden wurde eine Sämaschine auf Basis des vorhandenen ILT-Parzellendüngerstreuers entwickelt und an das Fahrzeugheck angebaut.
Ergebnisse von Feldversuchen
Bei Feldversuchen wurde die Lokalisierung von Weideresten und Trittschäden getestet und bewertet. Bei der Untersuchung stellte sich heraus, dass Weidereste mithilfe von Laserdaten detektiert werden können, jedoch hängt die Fehlerrate der Detektion von der Einstellung der Software ab. Aufgrund der Bodenunebenheiten besteht ein Konflikt in der Optimierung. Entweder alle Weidereste werden erkannt, jedoch auch Bodenwellen als Weidereste identifiziert. Oder es werden keine Bodenwellen missinterpretiert, aber Weidereste mit geringen Grashöhen werden nicht erkannt. Die Einstellung der Detektionsempfindlichkeit muss letztendlich dem Landwirt überlassen werden. Hinsichtlich der Detektion von Trittschäden mithilfe der ausgegebenen „Energiewerte“ des Laserscanners wurden sehr zufriedenstellende Ergebnisse erzielt. Beim Abscannen von Weideflächen konnten von Tieren getretene Pfade, sowie Flächen ohne Grasnarbe und sonstige Trittschäden erfolgreich detektiert werden. Dieselverbrauchsmessungen der Maschine ergaben, dass durch selektives Mulchen im Vergleich zu großflächigem Mulchen bis zu 10 % Kraftstoff eingespart werden können. Mit einem optimierten Motormanagement kann dieses Kraftstoffeinsparpotential sogar noch weiter gesteigert werden. Die Ergebnisse der Kalibration zur Frischmasseermittlung anhand mittels Laserscanner gemessener Grashöhen ergaben Bestimmtheitsmaße R² von bis zu 0,79. Der Pflanzenbestandstyp der jeweiligen Weidefläche hat dabei einen großen Einfluss. Messungen mit dem NIR-Sensor haben gezeigt, dass neben aussagekräftigen Referenzwerten robuste Modelle Voraussetzung für eine gute Validierung sind. Es konnte festgestellt werden, dass heterogene Bestände durch lokale Modelle besser erklärt werden können. Der TS-Gehalt konnte, insbesondere dank der ausgeprägten Wasserbande, mit guten Modellen erklärt werden. Erste Ansätze mit dem vorliegenden Sensor den Gehalt an Stickstoff zu bestimmen, führten nicht zu zufriedenstellenden Ergebnissen.
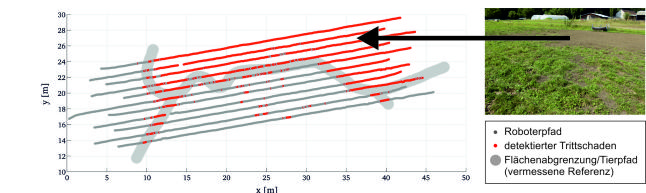
Ergebnis der Detektion von Trittschäden auf der Kuhweide
Projektinformation
Projektleitung: Dr. Z. Gobor, S. Thurner
Projektbearbeitung: B. Seiferth, A. Gain
Laufzeit: 2013 - 2017
Finanzierung: ICT-AGRI (BLE )
Projektpartner: Institut national de recherche en sciences et technologies pour l'environnement et l'agriculture (Irstea), Frankreich, Ege Universität, Türkei, Effidence S.A.S, Frankreich, Data Service Paretz GmbH, Deutschland
Projektleitung: Dr. Z. Gobor, S. Thurner
Projektbearbeitung: B. Seiferth, A. Gain
Laufzeit: 2013 - 2017
Finanzierung: ICT-AGRI (BLE )
Projektpartner: Institut national de recherche en sciences et technologies pour l'environnement et l'agriculture (Irstea), Frankreich, Ege Universität, Türkei, Effidence S.A.S, Frankreich, Data Service Paretz GmbH, Deutschland