Forschungs- und Innovationsprojekt
Erprobung, Bewertung und Optimierung von automatisierten Verfahren zur mechanischen Unkrautregulierung

Agrarroboter Farmdroid FD20
Hintergrund
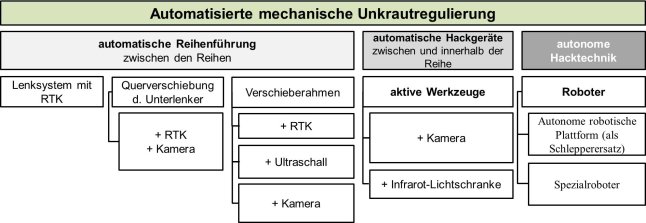
Im Bereich der mechanischen Unkrautregulierung sind verschiedene Automatisierungsgrade möglich:
Der Einstieg ist die automatische Reihenführung. Hier wird das Hacken zwischen den Reihen erleichtert, indem die Fahrbahn des Schleppers bzw. die Position der Hackmaschine an die Reihen angepasst wird. Die Reihen werden von Sensoren erfasst oder durch RTK GNSS bestimmt. So kann das Hackwerkzeug zwischen den Reihen gehalten werden und dort das Unkraut entfernen.
Unkraut ist jedoch nicht nur zwischen den Reihen, sondern auch in den Reihen der Kulturpflanzen. Weder mit konventionellen Hackgeräten noch mit der automatischen Reihenführung können diese Unkräuter entfernt werden. Hier folgt nun meist das arbeitsintensive Aushacken per Hand. Als Alternative gibt es jedoch auch automatische Hackgeräte, welche über Sensorik verfügen, die ein Erkennen der Nutzpflanze bzw. des Unkrauts ermöglicht. Aktive Werkzeuge hacken somit selektiv das Unkraut in der Reihe und umgehen die Nutzpflanze.
Ziel
Die bisher beschriebenen Technologien erfordern einen Schlepper mit einem ständig präsenten Fahrer. Es gibt jedoch auch Maschinen, die ohne Schlepper und ohne Fahrer auskommen. Autonome Hacktechnik, also Roboter bzw. autonom fahrende Maschinen, erledigen das Hacken selbstständig ohne Fahrer und menschliches Eingreifen. Hier gibt es zum einen Spezialmaschinen mit integrierten Werkzeugen und zum anderen Plattformen, bei denen – wie an einem Schlepper – verschiedene Werkzeuge bzw. gezogene Maschinen angebracht werden können.
Ziel ist es, vorhandene automatisierte Systeme zu testen und deren Praxistauglichkeit und Eignung zu prüfen und zu bewerten.
Übersicht zu automatisierten Systemen zur mechanischen Unkrautregulierung
Methode
Zunächst werden marktverfügbare Technologien recherchiert und verglichen. Im Anschluss werden Technologien ausgewählt, welche in Tast- und Exaktversuchen erprobt und bewertet werden.
Aus den Ergebnissen der Versuche werden anschließend technologiespezifische Optimierungsvorschläge abgeleitet. Dies geschieht vor allem im Hinblick auf die bayerischen Agrarstrukturen.
Ebenso wird ein gesamtbetrieblicher Bewertungsansatz entwickelt, in dem Ertragseffekte, arbeitswirtschaftliche Effekte, Risikoaspekte und eine Wirtschaftlichkeitsbetrachtung eingebunden werden. Auf dessen Basis werden die untersuchten Technologien bewertet.
Des Weiteren werden Strategien zum effizienten Einsatz dieser kapital- und wissensintensiven autonomen und automatisierten Technologien entwickelt und bewertet. Hierzu werden Konzepte ausgearbeitet, die eine hohe Auslastung der Technologien sicherstellen.
Aktuelle Projekte
- Erprobung und Bewertung des autonomen Sä- und Hackroboters Farmdroid FD20 (Farmdroid ApS., Rødding, Dänemark) in einem Tastversuch
- Erprobung und Bewertung des autonomen Hackroboters Oz (Naïo Technologies, Escalquens., Frankreich)
- Durchführung einer Felddemonstration von automatisierter Hacktechnik
Farmdroid FD20
Die Arbeitsgruppe Agrarrobotik der Bayerischen Landesanstalt für Landwirtschaft erprobt derzeit den Farmdroid FD20, einen Agrarroboter, der autonom Rüben sät und hackt.
Video: Farmdroid FD20 
Naio Oz
Der Feldroboter Oz erkennt über optische Sensoren die Reihen und kann mit verschiedenen Werkzeugen ausgestattet werden. Hier ist er mit Gänsefußhacken und Fingerhacken ausgerüstet und entfernt das Unkraut zwischen den Reihen.
Ergebnisse
Feldrobotik bietet große Potenziale für eine nachhaltigere, gesellschaftlich akzeptierte und damit zukunftsfähige bayerische Landwirtschaft. Vor allem in der mechanischen Unkrautregulierung, die insbesondere im Ökolandbau oft mit hohem Aufwand verbunden ist, ist der potenzielle Nutzen von automatisierten bzw. autonomen Systemen für Landwirtinnen und Landwirte besonders hoch. Weiterhin ist zu erwarten, dass ein Beitrag zum 50-%-Reduktionsziel bei chemisch-synthetischen Pflanzenschutzmitteln durch diese Innovationen erzielt werden kann.
Vor Beginn des Projekts im Jahr 2020 waren die Systeme zur autonomen Unkrautregulierung nur ungenügend und dabei meist in gartenbaulichen Kulturen erprobt. Deshalb herrschte zu diesem Zeitpunkt eine große Unsicherheit bezüglich ihrer Eignung für den Einsatz im Ackerbau. Eine objektive Bewertung dieser Systeme in ackerbaulichen Kulturen wurde daher als essenziell angesehen. Im Rahmen des Projekts "Erprobung, Bewertung und Optimierung von automatisierten und autonomen Systemen zur mechanischen Unkrautregulierung" wurden deshalb marktverfügbare Hackroboter und automatisierte Hacksysteme sondiert und vielversprechende Systeme ausgewählt, um in Feldversuchen erprobt zu werden. Dafür wurde am LfL-Standort Ruhstorf a.d.Rott eine Versuchsinfrastruktur aufgebaut. Es wurden mehrere Tastversuche und ein mehrjähriger Exaktversuch durchgeführt. Auf Basis dieser Versuche wurden die Feldroboter bewertet. Ebenso wurde durch Feedback an die Hersteller sowie prototypische Veränderungen eine Optimierung der getesteten Roboter durchgeführt.
Für den Feldroboter Farmdroid FD20 wurde weiterhin ein Modell zur Bewertung der Wirtschaftlichkeit auf Betriebsebene erstellt. Dieses wurde mit Daten aus Exaktversuchen parametrisiert (Arbeitszeitbedarfe, Erträge usw.). Das Modell wurde genutzt, um verschiedene Einsatzszenarien und Strategien zu simulieren und zu prüfen. Zur Validierung der Versuchsergebnisse, des Modells und der daraus entwickelten Szenarien wurde eine Fokusgruppendiskussion mit bayerischen Landwirten durchgeführt, die bereits mehrjährige Erfahrung mit dem Farmdroid FD20 haben. Aus den beschriebenen Arbeiten können die folgenden zentralen Ergebnisse abgleitet werden:
 Zoombild vorhanden
Zoombild vorhanden
Die vollautomatische Kamerahacke der Firma Poulson beim Hacken von Zuckerrüben
In einem Tastversuch wurde der Robovator der Firma Poulson als Vertreter der vollautomatischen Hacken untersucht. Dabei zeigte sich, dass mit dem Robovator die Pflege von Zuckerrüben nur mit einem besonders großen Abstand der einzelnen Kulturpflanzen in der Reihe möglich ist. Die Pflanzen im Tastversuch standen in einem Abstand von 18 cm. Es fiel dem System dadurch schwer, einzelne Pflanzen zu erkennen, und es fungierte so hauptsächlich als Kamerahacke mit Verschieberahmen, da zwar die Positionierung der Hackwerkzeuge zwischen den Reihen aktiv und zuverlässig vom Robovator geregelt wurde, aber das Einfahren der Werkzeuge in die Reihen meist nicht geschah. Der Tastversuch zeigte, dass – die zum Zeitpunkt der Erprobung verfügbaren – vollautomatische Kamerahacken zwar ein grundsätzlich vielversprechendes Konzept sind, jedoch auch sehr komplex in der Bedienung und empfindlich für Umwelteinflüsse. Die Untersuchung des Poulson Robovator wurde nicht weiterverfolgt, da sich während der Projektlaufzeit die Entwicklung der Feldrobotik dynamischer und zukunftsträchtiger gezeigt hat.
Oz 440 (Firma: Naio)
Der Oz 440 war der erste marktverfügbare Roboter, welcher der Idee der kleinen Feldrobotik bzw. der Schwarmrobotik am nächsten kommt. In seiner ersten technischen Ausstattung nutzte der Oz 440 optische Systeme zur Erkennung von Kulturreihen, um dann zwischen diesen zu fahren. In den Tastversuchen wurde jedoch festgestellt, dass diese Art der Navigation in Ackerkulturen sehr fehleranfällig und auch sehr aufwändig in der Vorbereitung war (Start- und Endpunkt der einzelnen Reihen mussten je mit einem roten Stab markiert werden). Während des Untersuchungszeitraums wurde das Navigationssystem weiterentwickelt. Dieses basiert nun auf RTK GNSS. Somit sind die Fahrspuren des Oz 440 jetzt im Vorfeld klar zu definieren, und es ist möglich, sicher in Maisreihen mit 75 cm Reihenabstand zu hacken. Aufgrund des schmalen Radstands von knapp 0,5 m ist der Oz jedoch nicht für Seitenhänge geeignet. Um weitere Einsatzszenarien für den Oz 440 zu identifizieren, wurde mit der Bayerischen Landesanstalt für Weinbau und Gartenbau kooperiert. So wurde der Oz 440 erfolgreich in einer Baumschule zur Unkrautregulierung eingesetzt. Damit ist der Einsatz des Oz 440 in Baumschulen ein interessantes Szenario und wird in der Planung zukünftiger Projekte weiterverfolgt.
FD20 (Firma: Farmdroid)
Der FD20 wurde als frühzeitig verfügbares und für Landwirte interessantes autonomes System sehr intensiv untersucht. In den Exaktversuchen zeigte sich dabei, dass sich der mit dem FD20 zu erzielende Zuckerrübenertrag auf einem Niveau mit dem Ertrag der ökologischen Vergleichsvariante (Unkrautregulierung mit Traktorhacke und Handarbeitsstunden) bewegte. Die Restverunkrautung war im ersten Versuchsjahr in der FD20-Variante deutlich höher, in den beiden nachfolgenden Jahren war diese auf einem ähnlichen Niveau mit der Referenz. Es konnten in allen Versuchsjahren Handarbeitsstunden beim Einsatz des FD20 eingespart werden. Die Spanne reichte dabei von 12 bis 200 h/ha. Die ökonomische Bewertung zeigt, dass der FD20 wirtschaftliches Potenzial besitzt. Unter den getroffenen Annahmen zur Betriebsstruktur erreicht der FD20 mit Berücksichtigung der Förderung (BaySL Digital) ab 8 ha Einsatzfläche den Break-Even [9]. Die Förderung hat sich in Kombination mit den im Rahmen des Projekts durchgeführten vielfältigen Maßnahmen zum Wissenstransfer äußerst positiv auf die Verbreitung der Technologie ausgewirkt, sodass die komplementären Aktivitäten Förderung und Forschungsprojekt als sehr erfolgreich zu bewerten sind. Dies wird durch die Ergebnisse der durchgeführten Fokusgruppendiskussion mit den "early adopters" der Technologie unterstrichen [8].
 Zoombild vorhanden
Zoombild vorhanden
Der Feldroboter Agrointelli Robotti 150D mit angebautem Hackwerkzeug (Foto: Sebastian Lew)
Der Robotti 150D wurde in Tastversuchen erprobt. Dabei zeigten sich eine grundsätzliche Eignung des Systems für den Einsatz in der Unkrautregulierung, jedoch auch einige Limitationen: Der Robotti 150D verlässt als fahrerloses Fahrzeug die klassische Bauform der Traktoren. Er ist U-förmig konstruiert und umschließt das eingehängte Werkzeug. Dies führt dazu, dass die Fahrspuren des Roboters außerhalb des Arbeitsbereichs des Werkzeugs verlaufen. Während dies für die Bearbeitung von Beeten sogar von Vorteil ist, führt es in der klassischen ackerbaulichen Reihenbearbeitung zu erhöhtem Planungsaufwand. Ebenso hat der Robotti 150D eine einseitige Lagerung zwischen dem rechten Antriebsmodul und dem zentralen Querträger. Diese Lagerung lässt eine Rotation zwischen diesen beiden Komponenten zu, führt aber auch dazu, dass das rechte Hinterrad keine Last aufnehmen kann, welches von dem Anbaugerät im ausgehobenen Zustand erzeugt wird. Durch diese ungleiche Lastenverteilung kann es in Hanglagen bei Wendemanövern zum Traktionsverlust des Hinterrads auf der rechten Seite und einem Durchdrehen der Räder der linken Seite kommen. Ein weiterer limitierender Faktor ist die maximale Nutzlast von 750 kg. Für den Robotti 150D kann somit keine Empfehlung für klassische bayerische Ackerbaubetriebe ausgesprochen werden. Der Roboter scheint jedoch ein interessantes System für Sonderkulturen und für die Pflanzenzüchtung zu sein. Durch die Bauform ist er ideal für Beete und kann mit den leichteren Arbeitsgeräten gut arbeiten. Der Robotti 150D wäre hier vor allem als Scouting- und Boniturplattform sinnvoll, da auch komplexe Spurplanungen möglich sind. Die Züchtung ist auch personal- und handarbeitsintensiver, wodurch sich in der Überwachung des Roboters Synergieeffekte ergeben können.
Akzeptanz
Schließlich zeigt eine durchgeführte Befragung zur Akzeptanz von Feldrobotern, dass für größere Betriebe die erwarteten finanziellen Vorteile der Feldrobotik zentral sind und große autonome Traktoren bevorzugt werden, während kleinere Betriebe und Ökobetriebe die erwarteten Umweltvorteile der Roboter wichtiger einschätzen und kleinere Roboter bevorzugen. Ebenso kann gezeigt werden, dass ökologische Landwirtschaft mit dem Vorhaben in Feldrobotik zu investieren positiv korreliert ist. Besonders interessant ist, dass bei der Befragung der überbetriebliche Einsatz die beliebteste Art des Roboterfeld-Einsatzes darstellte. Aus den Förderdaten des BaySL-Digital-Förderprogramms zeigt sich jedoch aktuell, dass ganz überwiegend einzelbetrieblich in die Technologie investiert wird. Diese Diskrepanz ist zum jetzigen Zeitpunkt auf die erst kurze Marktverfügbarkeit der Technologien zurückzuführen sowie auf technologische sowie rechtliche Aspekte, welche aktuell den überbetrieblichen Einsatz hemmen.
Veröffentlichungen
- Kopfinger, S., Vinzent, B. (2021): Erprobung und Bewertung eines autonomen Hackroboters. Referate der 41. GIL-Jahrestagung
- Lowenberg-DeBoer, J., Behrendt, Canavari, M., Gabriel, A., Huang, I., Kopfinger, S., Meyer-Aurich, A., Milics, G., Olgunju, K., Pedersen, S., Rose, D., Spykman, O., Tis-seyre, B., Zdráhal I. (2021): The Impact of Regulation on Autonomous Crop Equipment in Europe; Abstract für ECPA 2021
- Kopfinger, S; Vinzent, B. (2021): Erste Erfahrungen mit dem autonomen Feldroboter Farmdroid FD20 in Zuckerrüben, in DZZ, Ausgabe Januar 2021
- Spykman, O., Gabriel, A. Ptacek, M, Gandorfer, M. (2021): Farmers’ perspectives on field crop robots – Evidence from Bavaria, Germany, Computers and Electronics in Agriculture, Volume 186
- Spykman, O., Emberger-Klein, A., Gabriel, A., Gandorfer, M., (2021): Feldroboter aus Sicht der Gesellschaft – Auswertung eines Discrete-Choice-Experiments. In: Meyer-Aurich, A., Gandorfer, M., Hoffmann, C., Weltzien, C., Bellingrath-Kimura, S., Floto, H. (Hrsg.), 41. GIL-Jahrestagung, Informations- und Kommunikationstechnologie in kritischen Zeiten. Bonn: Gesellschaft für Informatik e.V.. (S. 295–300).
- Pfeiffer, J., Kopfinger, S., Gandorfer, M. (2022): Reduktion des Herbizideinsatzes mit digitalen Technologien. Schule und Beratung Heft 7_8_2022
- Pfeiffer, J., Kopfinger, S., Demmel, M. (2022) Wenn Visionen Wirklichkeit werden, Bayerisches Landwirtschaftliches Wochenblatt Ausgabe 25, 24.06.2022
- Spykman, O., Kopfinger, S., Gabriel, A., Gandorfer, M., (2023): Erste Praxiserfahrung mit einem Feldroboter – Ergebnisse einer Fokusgruppendiskussion mit [lang=en]early adopters[/en]. In: Hoffmann, C., Stein, A., Ruckelshausen, A., Müller, H., Steckel, T., Flo-to, H. (Hrsg.), 43. GIL-Jahrestagung, Resiliente Agri-Food-Systeme. Bonn: Gesell-schaft für Informatik e.V.. (S. 243–254).
- Spykman, O., Roßmadl, A., Pfrombeck, J., Kopfinger, S., Busboom, A. (2023): Wirtschaftlichkeitsbewertung eines Feldroboters auf Basis erster Erfahrungen im Praxiseinsatz. In: Hoffmann, C., Stein, A., Ruckelshausen, A., Müller, H., Steckel, T., Floto, H. (Hrsg.), 43. GIL-Jahrestagung, Resiliente Agri-Food-Systeme. Bonn: Gesellschaft für Informatik e.V.. (S. 255–266).
Projektinformation
Projektleitung: Stefan Kopfinger
Projektbearbeiter: Stephan Sighart
Laufzeit: 01.01.2020 bis 31.12.2022
Finanzierung: Bayerisches Staatsministerium für Ernährung, Landwirtschaft, Forsten und Tourismus
Förderkennzeichen/Fördernummer: A/19/11



 Zoombild vorhanden
Zoombild vorhanden
 Zoombild vorhanden
Zoombild vorhanden
 Zoombild vorhanden
Zoombild vorhanden
 Zoombild vorhanden
Zoombild vorhanden
 Zoombild vorhanden
Zoombild vorhanden
 Zoombild vorhanden
Zoombild vorhanden