


Forschungs- und Innovationsprojekt
Autonome Steuerung von Robotern für die Innenwirtschaft

Entmistungs-, Liegeboxenreinigungs- und Einstreugerät
Zielsetzung
Ziel des Vorhabens ist es, ein universell einsetzbares Steuerungsmodul zur autonomen Geräteführung in der Innenwirtschaft zu entwickeln und dieses auf dafür entwickelten Plattformen für die Entmistung von Laufflächen, die Reinigung von Liegeboxen, das Einstreuen von Liegeboxen und für die Vorlage von Grund-/Kraftfuttermischungen über Futtermischwagen exemplarisch einzusetzen und zu erproben.Methode
- Abschieben der Laufflächen nach vorgegebenem Stundenplan
- Reinigen der freien Liegeboxen (min. 1 x / Tag)
- Selbstständiges Auffüllen des Einstreubehälters
- Häufigere Reinigung der stärker verschmutzten Flächen
- Keine Reinigung des Fressbereichs während der Fütterungszeiten
- Einsatz verschiedener Einstreumaterialien

Selbstfahrer-Futtermischwagen
- Personengebundenes Befüllen des Mischwagens
- Personengebundene Fütterung der Tiergruppen Kälber, Jungvieh, Trockensteher, etc.
- Autonome Fütterung der laktierenden / hochleistenden Kühe mehrmals täglich
Ergebnisse
Entmistungs-, Liegeboxenreinigungs- und Einstreugerät
 Zoombild vorhanden
Zoombild vorhanden
Abb. 1: Entmistungsgerät mit Reinigungs- und Einstreumodul
Selbstfahrerfuttermischwagen
 Zoombild vorhanden
Zoombild vorhanden
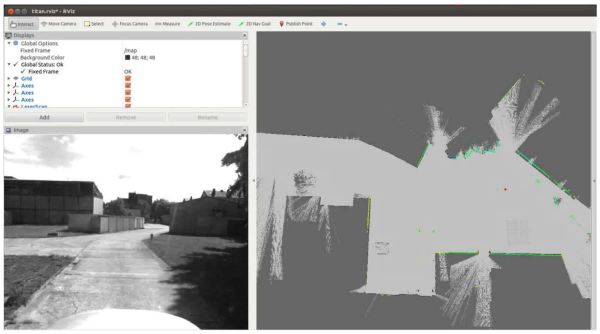
Abb. 2: Auswerteoberfläche der Laserscannerdaten
Die Orientierung des Gerätes erfolgt über die Kombination von Odometrie, Inertialmesseinheit und Laserscannerdaten. Auf Basis der Sensordaten lässt sich mittels SLAM (Simultaneous Localizatino and Mapping) Algorithmen eine zweidimensionale Karte der Umgebung generieren. Dies geschieht innerhalb weniger Minuten durch einfaches manuelles Befahren des Hofes. Anschließend ist das System in der Lage, sich innerhalb dieser generierten Karte mit Hilfe eines Partikelfilters (Monte Carlo Localization) zu orientieren, in dem es die aktuell gemessenen Laserscannerdaten mit den Daten der Karte abgleicht und die wahrscheinlichste Aufenthaltsposition bestimmt und weiter verfolgt. Abbildung 2 zeigt die Auswerteoberfläche der Laserscannerdaten.
Futterhygiene
 Zoombild vorhanden
Zoombild vorhanden
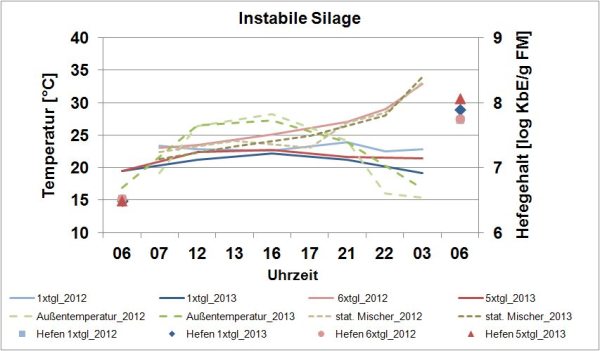
Abb. 3: Temperaturverlauf und Hefegehalte der Futtermischung bei Einsatz instabiler Silagen im Sommer
Insbesondere im Futtermischwagen erwärmte sich die Futtermischung in beiden Versuchsjahren um über 10 Kelvin. Die Hefegehalte stiegen unabhängig von der Fütterungsfrequenz von über 106 auf ca. 108 KbE/g FM an. Bei Einsatz von stabilen Silagen konnte auch im Sommer keine Erwärmung der Futtermischungen festgestellt werden. Die Hefegehalte stiegen zwar auch hier gegenüber dem Ausgangsniveau an, lagen aber im Futterrest immer noch auf einem Niveau von ca. 106 KbE/g FM. Im Winter bei niedrigen Umgebungstemperaturen konnte weder bei stabiler, noch bei instabiler Silage eine Erwärmung der Futtermischung und ein Anstieg der Hefegehalte beobachtet werden.
Projektleitung: Dr. Bernhard Haidn
Projektbearbeitung: Stefanie Adeili
Laufzeit: 2012 - 2015
Finanzierung: Bundesanstalt für Landwirtschaft und Ernährung (BLE)
Projektpartner: TU Braunschweig, Hirl Misch- und Anlagentechnik GmbH & Co. KG, Peter Prinzing GmbH
Förderkennzeichen: 28154T1510
Tierhaltung - Rinder
Der Bereich Rinderhaltung beinhaltet Informationen über Haltungssysteme und -verfahren für Kälberaufzucht, Rindermast, sowie Milch- und Mutterkuhhaltung. Wir stellen Ihnen Erkenntnisse aus aktuellen wissenschaftlichen Untersuchungen, Erfahrungen und Praxisempfehlungen vor. Mehr
Übersicht: Rinder (Tierhaltung)